Feels like a weird thing to not have known, but now I know: the symbols we refer to in the West as “Arabic numerals,” aka regular ol’ numbers, while indeed (“Western”) Arabic, are not the (“Eastern”) symbols used in conjunction with the actual Arabic alphabet.
While learning to count in Arabic, it occurred to me that English having acquired the (Western) Arabic numerals from a language written right-to-left, the way we write numbers in left-to-right English is arguably backwards in relation to the rest of written language. This probably would not have occurred to me had I not just taken a class on digital logic, where the basic material often involves converting between decimal and binary (or hexadecimal if you’re fancy). The understanding required to do that, which generally goes unspoken even though everyone who has mastered counting does know on some level know it, is that a “number” is a collection of symbols representing multiplications of each power of whatever base you happen to be counting in, going up from the right to the left, starting with the base to the power of 0. So the number 6358, in our base-10 system, is implicitly understood as (6 × 103) + ( 3 × 102) + (5 × 101) + (8 × 100), or if you prefer, (6 × 1000) + (3 × 100) + (5 × 10) + (8 × 1).
When you’re reading a number in English, your eyeball hits the most significant digit, i.e. the one on the left which is multiplied by the largest power, first; but you don’t actually know what that digit means until your eyeball hits the least significant digit, i.e. the one on the right. The fact that the number 6358 starts with a 6 means nothing about its magnitude until I know that there are four digits making up the number. In regular life nobody could possibly care about or even notice this discrepancy with how the rest of the language works. But if you wanted to convert numbers between different bases, the first thing you might do is write out all of the powers of the base you have, from 0 up to the highest power needed to give you the number you want– and the only reasonable way to do that is starting at the right and working to the left, since that’s the order in which the final number is going to be written. Similarly, any basic arithmetic operations have to proceed in a right-to-left fashion, since you need to add/multiply/whatever the digits in the smaller positions in order to bring any carries forward to the larger.
Numbers, then, are written in reverse from the rest of the English language in terms of the direction in which you need to work through them. The names we give to numbers fixes the “don’t know what the first digit means until your eye hits the last one” problem, if that could be called a problem; in general the most significant digit is stated first, using a word that tells you how many digits there are going to be in the number before you actually know all of them. The word “twenty nine” tells you from the first word that there are only two digits. In contrast, the Arabic words for numbers reads them out right to left, giving them in order of least to most significant; so 29, or ٢٩, is read “tis’a wa-’ishrun”; first there’s a 9, tis’a, and then a 20, ‘ishrun. You don’t know the order of magnitude of the number until it’s finished being stated, but proceeds in what seems to be a more logical and extensible fashion, from smallest to largest.
So for instance this page states that “numerals in Arabic are written from left to right, while letters are written from right to left.” Unless it’s perhaps referring to usual stroke order, in which case I have no idea, this seems to me to be incorrect or at least Anglocentric. An Anglophone would consider the “direction” a number goes to be from most to least significant digit, but there is no reason that insist that’s the case, and several good reasons to say it’s not and the real “direction” of a number is from least to most significant digit. In which case numerals in Arabic are written right to left, just like they secretly are in English.
Today’s journey through the Hajar mountains, from Sohar to Nizwa by way of Ibri:
Visited the Sultan Qaboos Grand Mosque Sohar, where we were kindly shown around by a woman from their library. Apparently this mosque is more inspired by Persian architechture, as opposed to– well, I guess we’ll find out when we see the Sultan Qaboos Grand Mosque Muscat.
If you ever get too wrapped up in the metaphysics of authenticity, the Dubai Mall Gold Souk wants a word with you. Can a self-conscious recreation of a particular heritage aesthetic, right in the middle of an enormous shopping mall, ever be a “real” example of the kind of thing it’s attempting to recreate?
In North America the answer would be no, go to Tacky Jail for a thousand years. In the Gold Souk, one wonders– okay, if this isn’t the real thing, then what exactly is it? What could possibly make it more “authentic” than it already is? Or rather, what makes things “inauthentic”? If the architecture were made out of cheaper materials than the ones being imitated, perhaps, but clearly no expense has been spared on that front. If it were being used for some purpose other than the one being imitated or by some group other than the ones laying claim to the heritage in question, but in this case it is indeed a place where you can buy gold, precious stones, and perfume for the enrichment of Emirati merchants.
The real purpose of this space seems to be to remind anyone concerned about the authenticity of what they’re viewing: every monument of the ancient world was once an infrastructure project built by a government or individual who wanted to remind you, personally, that sometimes money can in fact buy good taste, or at least buy the ability to determine what good taste is, thank you very much, and hoi polloi are very welcome for the nice place to sit/pray/eat/shop/etc.
Anyway, yesterday we ate breakfast at a place in the middle of it:
And spent a lot of time waiting around in the mall for a place that sold SIM cards to open, before deciding that actually it would be better to just wait out the 24 hour UAE tourist SIM card and then get a longer-term one in Oman. “Waiting around” in the Dubai Mall meant a lot of opportunity to hang out with these guys:
There is an official aquarium tunnel that you can pay to walk through, but the tank is just as visible from the outside of it. We also walked around outside, including to the (outside of the ) opera house; there isn’t anything on at the moment, so this is the closest we could get without paying for a really expensive tour:
Having thoroughly fucked up the get-over-jet-lag-in-Dubai plan by having a four hour nap, we tried to salvage the rest of the day by taking the public transit boat thingy across the creek to Deira:
Dubai was just a short stop on the way to the main purpose of the trip, Oman; we flew to Muscat this morning, then picked up a rental car and drove to Sohar, where we’ll be for the next few days.
Toronto to Dubai is 12 hours; I tried sampling the in-flight entertainment system, which now has a huge number of titles, but many didn’t have subtitles and you can’t hear anything over the airplane itself, so unsure what the point is. Ended up rewatching stuff where I already knew more or less what they were saying, namely the episodes of Succession in which this guy mops the floor with those rich fucks (“You can’t make a Tomlette without breaking a few Gregs?”)
Perhaps this was on the mind because my only previous association with Dubai was also this particular guy being really fed up, namely, in the reboot of Interview with the Vampire:
At the limits of that entertainment I also worked on what I’d meant to be working on for the last year, which was that I’d wanted to at least be able to sound out words in Arabic by the time I spent two weeks in the Middle East. Not exactly for practical purposes– in most of the places we’ll be going, all important signs and directions are transliterated anyway– but it would have been nice to have some mode of interaction with the environment other than wandering around saying “English?” like the north american anglophone tourist I am. However, I spent the past year learning circuit analysis and digital logic, not Arabic, so here we are.
I downloaded an Anki deck for the alphabet, and by the time we got off the plane was able to pan around Oman on OpenStreetMaps (the only one I’d downloaded yet since that’ll be most of the trip) and read the place names with, hmm, perhaps 57% accuracy. Extremely introductory language learners– I have noted many times from the other side– are the absolute worst company, because they are likely to point to any word they recognize in the wild and force a full reckoning of their thought process upon anyone in the vicinity. “Look!” I say, pointing to the sign that also says “Dubai Duty Free” in English right there. “That says ‘Souk Dooty something’!”
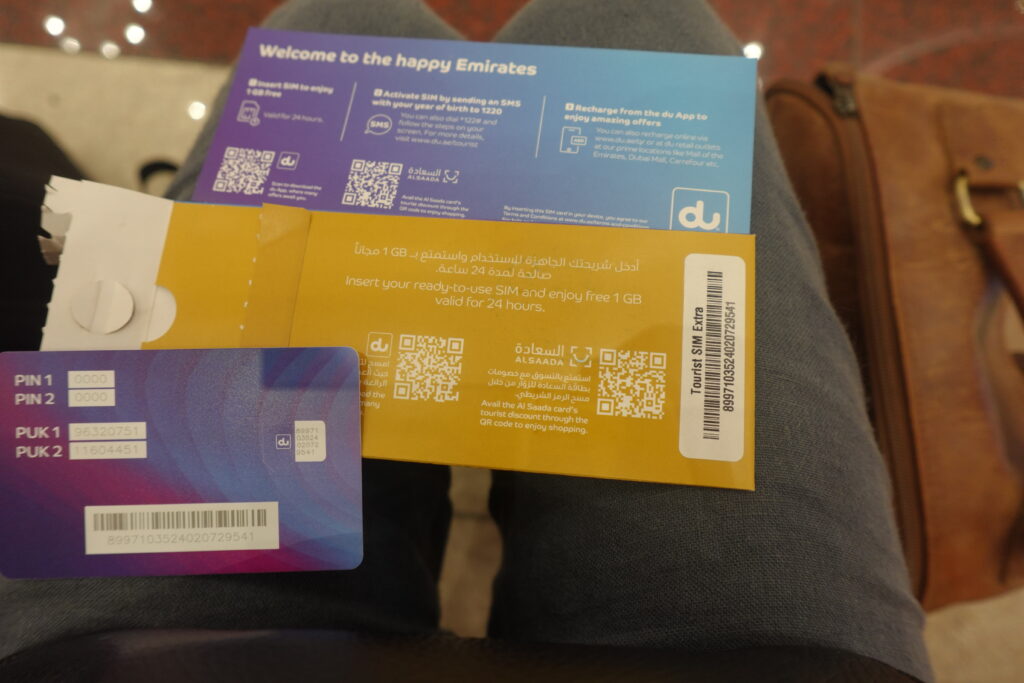
The UAE gives all incoming travellers a SIM card that works free for 24 hours, right there when they stamp your passport, which is both a) a thing that the kind of person who prattles about surveillance capitalism and the horrors of the corporate web and uses a VPN and surfs the Fediverse as a primary internet activity would never use, and b) a thing that anyone who has just spent 12 hours on an airplane and was already worrying about having to go find a SIM card first thing is absolutely going to use immediately.
Took the metro (“look! those letters spell ‘metro’!”) to the hotel. Perhaps this is just a function of it being, well, not cold as balls outside, but we were remarking on how the residential area surrounding the hotel, at around 10 PM, had a whole lot of people just hanging around outside in ways that you don’t tend to see in the West; for instance, sitting in circles in the middle of a parking lot outside storefronts selling snacks to fuel your parking-lot-sitting. I got some samosas from one such storefront and brought them back to the hotel to eat while engaging in my usual hotel activity of reading the literature provided beside the bed.
From the first few sections of the English Quran, I remarked in even more irritating fashion that a lot of Arabic words are recognizably, and understandably, derived from ancient Phoenician: for instance بَيت bayt, “house”, which corresponds to the (indeterminately vowelled since the Phoenician writing system was an abjad that only included consonant sounds) “BT” listed in the Xeroxed 1974 dissertation on the Phoenician and Punic languages lying around on my computer somewhere. Similarly, the Gideon Quran’s footnote on the use of the word رب rab, “lord/master,” which made me suddenly remember that that was the title applied to Carthaginian political leaders. Which is practically the only words I know in either of those languages, so not exactly conclusive, but (doofenshmirtz voice) it’s weird that it’s happened twice!
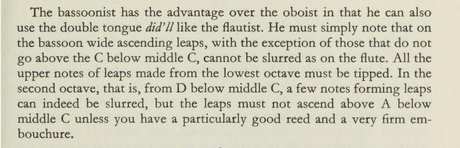
This semester I took an introductory class on electrical circuit analysis. One of the concepts introduced was impedance matching: the idea that if you want to deliver maximum power to a load, the amount that the load “pushes back” on the power source should be equal to (the complex conjugate of) the amount the rest of the circuit pushes back. If you were writing a textbook, you would convince your readers like so:
But what if you weren’t writing a textbook, and wanted to convince someone who was planning on simply getting up and walking away the moment any of those libertine little d’s or, god forbid, the imaginary unit (or the jmagjnary unjt, as the case may be) made an appearance?
Then you could say, imagine you are playing that game where you put a jump rope on the ground and send a pulse through it. You want to try to make sure that the pulse that reaches some given point on the jump rope is, as precisely as possible, exactly the same as the pulse that leaves your hand. You have two choices.
First, you could use two jump ropes tied together, where the two ropes have different thicknesses, or might be made of different materials, or maybe one of them is that beaded kind that hurts like a #!%$ when you hit yourself in the ankle with it:
Or your second option, you could just use one really long jump rope, that has the same thickness and material used throughout.
It’s intuitively obvious that, if there’s a possibility of you being asked to transmit that as-faithful-as-possible pulse to the far side of the rope, you’re way better off with the one long rope. If that isn’t obvious, it’s obvious that you can go buy some jump ropes and try it out for yourself. Of course, the rope that has the same “impedance” throughout is going to transmit the pulse more faithfully, while the tied-together bit is going to muck things up.
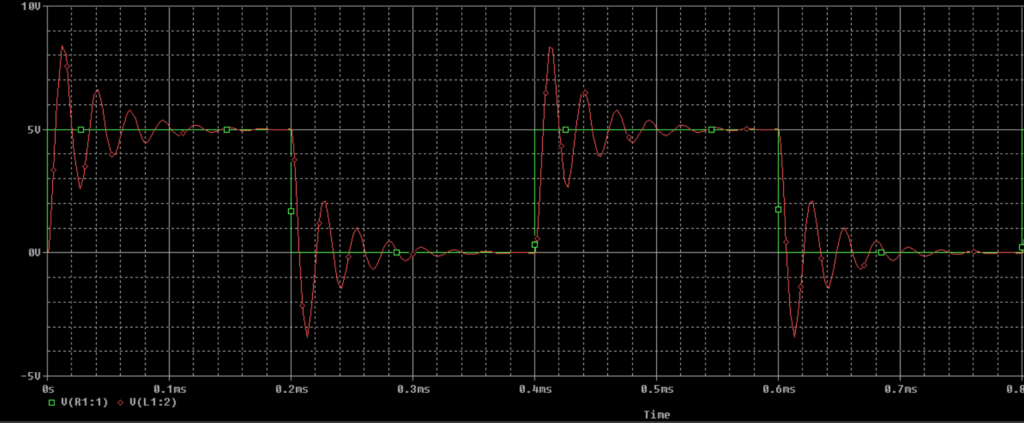
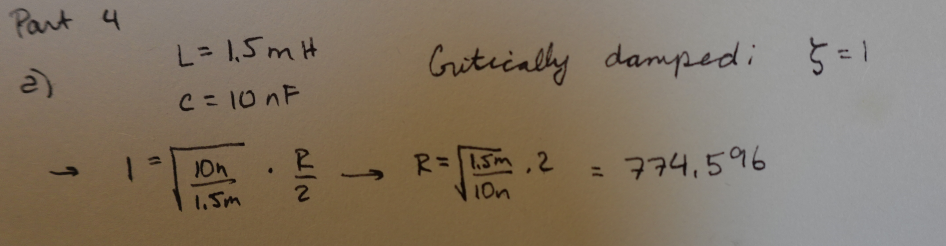
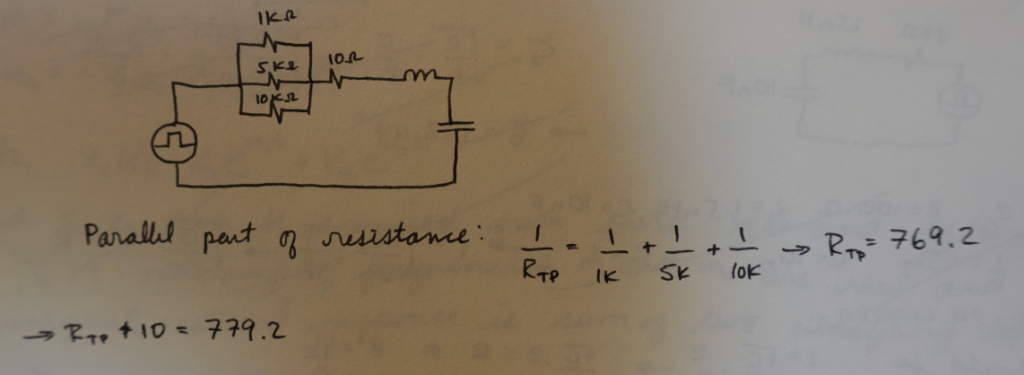
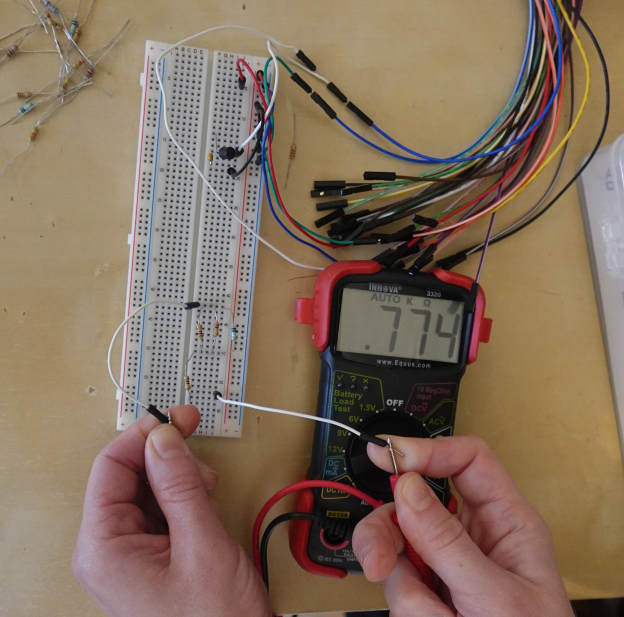
A piece of physical intuition that was less obvious to me at first was that for critical damping. In one assignment, we simulated in software and built in meatspace three different versions of an LRC circuit: an underdamped one, overdamped one, and then figuring out what resistive value to swap in to get it critically damped.
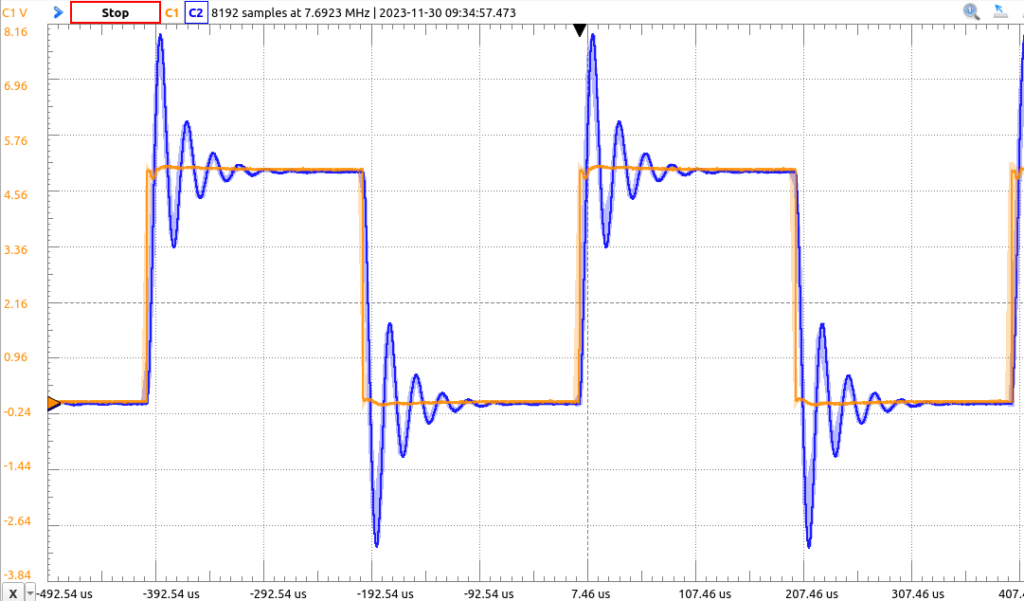
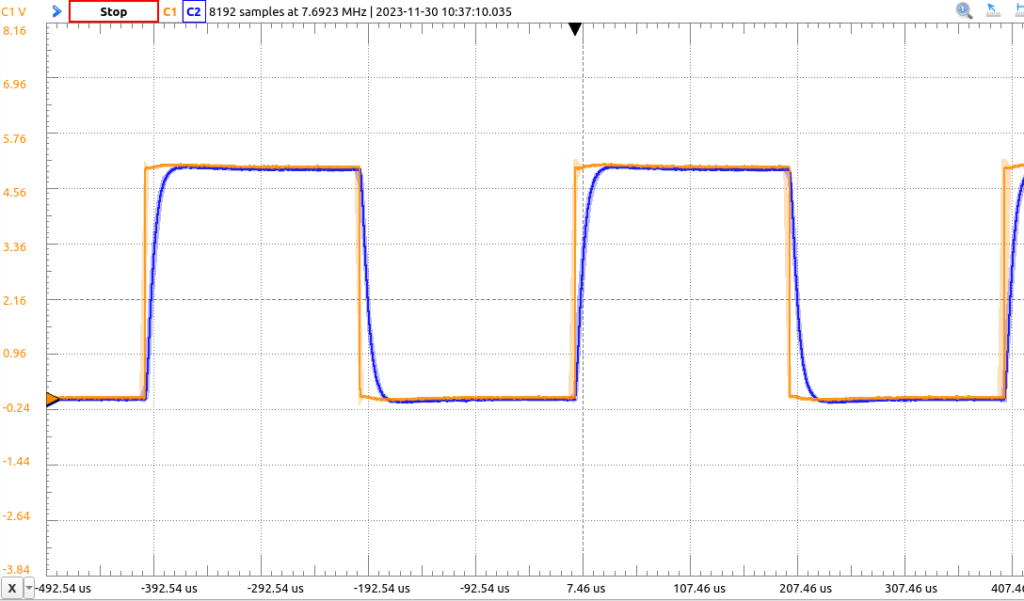
Of course, an underdamped circuit oscillates, as seen in both the simulation and the oscilloscope hooked up to a breadboard:
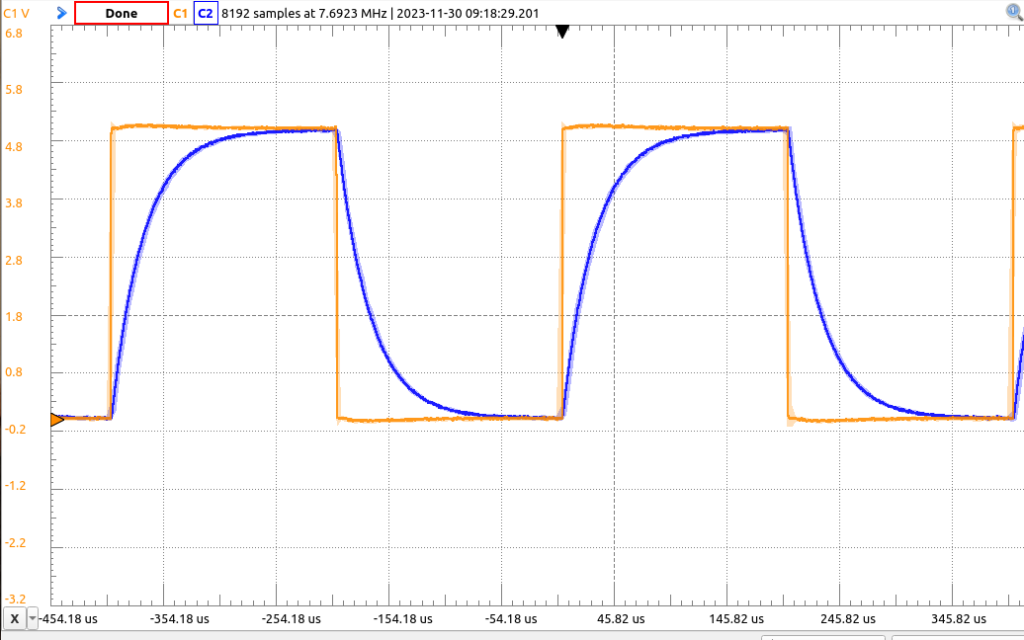
And an overdamped circuit decays exponentially:
A critically damped circuit– i.e., one where the characteristic equation of the circuit has repeated roots, and there is only one natural frequency– decays faster than an overdamped one:
Why, though? When the words are spoken, it sounds like the thing called “overdamped” should do the thing called “decaying” the fastest. The math, of course, is entirely clear: with repeated roots to the characteristic equation, the solution to the differential equation has an exponential decay term multiplied by the independent variable of time, while the overdamped case has no such thing. So of course the critically damped case has to decay faster. But that’s just a property of multiplication, not a good explanation (and we lost the no-libertine-d’s-or-i’s-or-j’s observer some time ago.)
The physical intuition, then: imagine you are dropping a little ball into a glass of some kind of fluid. Your goal is for the ball to come to rest on the bottom of the glass– equilibrium– as quickly as possible. If the fluid is not sticky enough to slow down the ball before it hits the bottom, it will bounce (underdamped.) If the fluid is sticky, it will slow down the ball enough that it won’t bounce– but there is a point of stickiness beyond which any extra stickiness isn’t actually helping to prevent bounces, it’s just delaying the ball reaching the bottom. Just the right stickiness to prevent bouncing, without slowing down the ball’s progress more than necessary, is critical damping; excessive stickiness is overdamping.
I was playing a concert recently with a rather speedy Bach continuo part. As I was practicing, it occurred to me to wonder what exactly had happened to the technique of double-tonguing on the bassoon in the first part of the 20th century.
Plenty of Baroque continuo parts, including those usually including bassoon, contain passages that only the most freakish of wagglers could single-tongue. It seems obvious that Baroque bassoonists must have been able to double tongue; and sure enough, in JJ Quantz’s chapter on articulation, after describing several tonguing techniques including double tonguing, he notes:
Why Quantz thinks you can’t double tongue on the oboe is a mystery for another day (or for a Baroque oboist to tell me); the point is, bassoonists were known double-tonguers in 1752, if not known good-reed-havers.
Why, then, did double-tonguing seem to disappear from the toolbox for a period of time? That it did is of course anecdotal, but it does seem to me that among the generation of professional bassoonists who got jobs in the early or mid 20th century, it was very much an optional technique. That generation is largely gone from the active playing scene, but many people still have stories of teachers or older colleagues who didn’t double tongue, and I have even heard it said by some of those players that bassoons don’t double tongue, or that if they do it is a new invention. (This does seem to be largely true on clarinet. “Fucking slur two tongue two… shit!”)
In August, a sixteen year old student reverse-engineered iMessage, and published an open-source Python library allowing anyone to send and receive encypted messages with Apple users right from the command line. Crucially, he didn’t “break” the encryption; he simply figured out how to use it, meaning that while Apple has been forcing its users to communicate with all non-iPhone users via insecure, unencrypted SMS messages if they want to use their default messaging app– which they’re also not allowed to change for a different default– JJtech had figured out how to allow the rest of the world to meet iPhone users in their own walled garden when they refuse to or can’t leave it. In a climate where the tech robber-barons are finally undergoing some antitrust scrutiny, interoperability of messaging platforms is an obvious issue to address; and indeed, after years of pressure and openly admitting that lack of interoperability was the goal in order to force people to buy iPhones, Apple has finally said it will adopt RCS in 2024, a secure standard that will replace SMS and, hopefully, if Apple doesn’t break it for their own users on purpose, fix the problems with group messaging that currently exist on the iPhone-Android divide.
Reverse-engineering for the purpose of interoperability is explicitly protected by the Digital Millenium Copyright Act; so a company called Beeper hired JJtech and rewrote his code to create the beginnings of a universal texting app, which would start just as a way for Android users to send iMessages but planned to incorporate RCS, Discord, Whatsapp, and Matrix chats all into one space. Apple moved to shut it down, Beeper got itself back up, and the two are currently in a (probably protracted) cat-and-mouse game of adverserial interoperability.
That’s not actually my point. My point is that I got curious about Eric Migicovsky, Beeper’s CEO; who, it turned out, had also created the first functional and widely available smartwatch.
But not just any smartwatch. The Pebble was the first Kickstarter campaign to raise over $10 million dollars, and created the demand for smartwatches that Apple would later exploit. And, indeed, Apple eventually ran over Pebble like a, well, Mac truck. But Pebble, amazingly, survived, and in a way that Apple devices could never. From ifixit’s Rebble with a Cause: How Pebble Watches Were Granted an Amazing Afterlife:
The next wave of Pebbles focused on fitness, something Apple was already pivoting toward with its second Watch, but Pebble didn’t have Apple’s money. After months of last-ditch fundraising attempts, Fitbit paid a scant $23 million for Pebble’s software assets and engineer hiring rights in December 2016. While Fitbit would not officially support Pebble’s customers, Migicovsky worked out a deal that would refund Kickstarter pre-orders, and, he hoped, keep the more than two million Pebbles sold, and their apps, working for as long as possible.
In hindsight, he nailed it. Pebble has been the most successful hardware company failure in history. Compare this to Revolv, whose acquisition by Nest led to an abrupt shutoff of smart homes around the world, or personal cloud device Lima, or, really, any Android device more than a couple years old.
From the rubble formed Rebble, a team of motivated fans, developers, and ex-employees, rushing to reproduce years of development in a matter of days. Frantic to document critical APIs and development tools before the servers shut off, they grabbed everything they could. The first replacement app store appeared quickly, aptly code-named Panic App Store. Within a few days, they had firmware, core and third-party apps, all the dev tools, and more. And they preserved it all on a wiki, right down to the pinouts.
More than 177,000 people have connected their devices to Rebble’s services. Not everything can be free, because the APIs for voice dictation and weather are not cheap—$750,000 per year, if 100,000 people used them, Berry said. And yet, nearly 9,000 people pay yearly subscriptions. Full disclosure, in case you haven’t guessed: I pay for Rebble’s services on my Time Steel, which I wore in our video about … the Apple Watch.
The Rabble project not only has replacement web services, it also has a network of resources for replacing the batteries in Pebbles, 3D printing replacement buttons and cases for them, and is even working on creating entirely new hardware for RebbleOS to eventually run on.
So, I went on Facebook Marketplace and searched them up– and sure enough, there was one for sale close by for a whopping $10. Admittedly, the price point was probably partly because it was one of the very first generation of the watches, probably manufactured around 2013. While later versions were somewhat more refined aesthetically, the original looks like exactly the smartwatch that time travellers from 1960 would expect to find people wearing in 2013:
Anyway, I charged up my new Pebble and followed the instructions on the Rebble setup guide, and within a few minutes had a fully functional smartwatch, with an all-freeware watchface and app store, at my disposal. I joined the very active Rebble discord, where development of both hardware and software is still ongoing, and where they recently hosted their first hackathon for apps and watchfaces, but turned out not to need to ask any questions at all about the process– it just worked.
It’s hard to remember, sometimes, that “being on the computer” used to be fun. Owning and using tech has turned from something that feels like a frontier of discovery and possibility into a kind of grim obligation; the vast majority of devices and internet services are predatory and bad, but you need to use them anyway, and they’re designed to try to make you keep using them even when you actively want to stop, and they’re spreading misinformation and misunderstanding, but what are you going to do about it?
Pebble is fun. Pebble is a good device in the way basically nothing manufactured since is. Although it can put through any level of notification from your phone that you want, and you can install plenty of apps giving you different ways of interacting with those notifications, some of the best apps available for it are things that have nothing to do with your phone at all.
One of my favourites, for instance, is called “wristronome”. It is the best metronome app I have ever encountered. It uses the three buttons on the side of the watch as up/down tempo and start/stop, then uses the very strong vibrations of the Pebble as a metronome. Although there are all sorts of android and iOS metronome apps, almost all of them come with ads, and have weird unusable interfaces that take way too much time just to turn your metronome up a few clicks; so I have been using the same Korg TM-40 since, well, before my Pebble was born. This is the first app that provides a genuine challenger to it. Not only does it do everything it needs to do as a metronome, the vibrations make it appropriate to use in crowded warmup rooms at gigs or auditions; whereas having a loudly ticking metronome on your stand in a room where everyone else is trying to practice and warm up too is kind of rude, this is unnoticeable to everyone but the wearer.
Another of my favourite apps is called Tilt Calculator. Unlike Wristronome, this is, admittedly, not a better calculator than any calculator I’ve tried before. In terms of its ease of use, it’s, well, kind of insane. But that is the point: Tilt Calculator is a completely insane piece of software, something that has never existed before or since, something that could only exist in this particular ecosystem. To operate Tilt Calculator, you tilt the pebble until the cursor rolls over the number you want like a ball bearing in one of those little maze games, and then press the side button to select it.
Indeed, this is not a convenient way of doing arithmetic. But it is an entirely new way of physically manipulating numbers, unheard of until now all the way back to the invention of drawing in the dirt with a stick. Apple would simply never think up something this fun.
There are plenty of other genuinely useful apps– tiny maps for your wrist, health tracking, apps to set a location that it will then lead you back to, etc– as well as plenty of gloriously useless ones. One of the best features of the Pebble, though is probably its battery life; because it has a transflective liquid-crystal display that requires no backlighting in bright environments and draws almost no power to continue showing an image, a new Pebble battery lasts for about 7 days, and even my ten-year-old battery lasts for four days. Compare that to the Apple watch, for which the company claims a new device’s battery will last 36 hours or up to 3 days if you use “low power mode.”
The only downside to my Pebble is that it’s, well, kind of ugly. But then, there are quite a few nicer-looking ones– and now that I’ve discovered the secret of the Only Good Smartwatch, I’ll probably pick one up when it comes up on marketplace of kijiji near me.
Learning phasor analysis; contemplating that it’s almost too metaphorically on-the-nose that analysis of purely real functions can become vastly easier when they are given an imaginary component. A similar feeling to that evoked by the process for solving the Gaussian integral, in which turning a one-dimensional problem into a two-dimensional problem provides an almost offensively simple answer to a seemingly intractable problem.
Linhan Cui is the real deal, as a conductor, and will soon be snapped up by a major orchestra if there’s any justice in the world; in the meantime, I treasure every concert I get to play under her direction.
















 Perhaps this was on the mind because my only previous association with Dubai was also this particular guy being really fed up, namely, in the reboot of Interview with the Vampire:
Perhaps this was on the mind because my only previous association with Dubai was also this particular guy being really fed up, namely, in the reboot of Interview with the Vampire: